

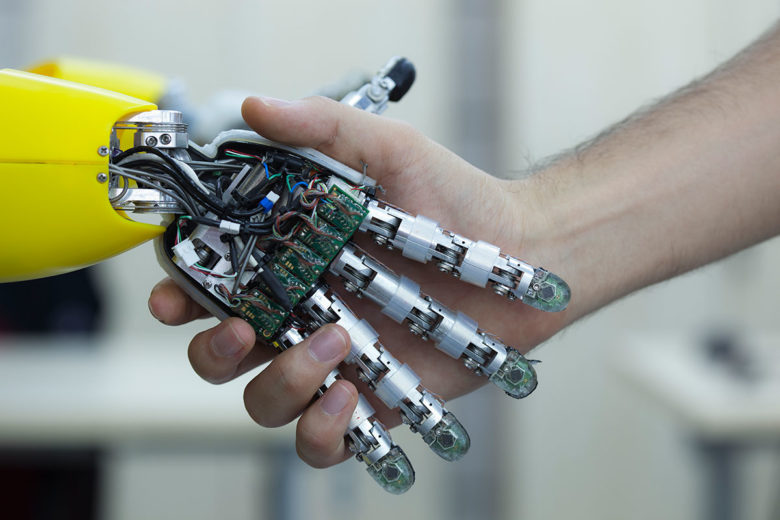
The functional applicability of a robot is a mirror reflection of all the human attributes and behaviors. Knowing how a robot work starts by taking the first glimpse of its creator, the human. Then what follows is how the human-behaviors can transform into robotic attributes and thus leading to a robotic life taking its first digital breath. An example of a mirrored human characteristic and behavior is the robotic-arm coffee maker.
You can follow this URL to learn more about it. It can mimic the way humans make and serve coffee in their home environment. The article thus takes a dig at the structural and functional adaptability of robots to their environment.
To understand the working of a robot, we should start from ground up with its creator, the human. The five essential, yet significant components that define human beings are:
Img source: analyticsinsight.net
- A body structure
- A way of moving the body structure, i.e., a muscle system
- A way of transmitting information concerning the human body and the environment that surrounds it, i.e., a sensory system.
- A method of activating the human muscles and sensors, i.e., a power source
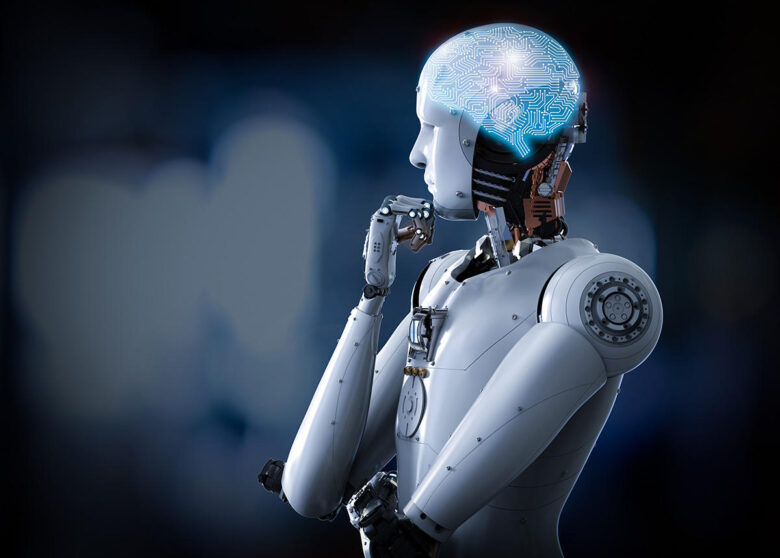
- A way of processing sensory information and communicating executable instructions to the muscle, i.e., a brain system
The above mentioned represents the tangible attributes of the human body structure. However, the components of a human body cannot be complete without the applicable mention of the intangible human qualities. They include useful intelligence and morality. Thus combining the above mentioned tangible and intangible attributes yields a fully assembled human being.
These same components are the exact match of what’s needed to come up with a robot. Hence the robots are a functional replacement of humans in both physical and logical manner. A typical representation of a robot includes a computerized brain, a power supply, a sensor system, a motor type, and a movable physical structure. The computerized brain is in full control of all the mentioned elements. Since robots are a simulation of the animal kingdom, it is safe to state that they replicate both human and animal attributes and behavior too.
Img source: news.cnrs.fr
We, therefore, have enough information on what sparked the creation of robots and thus can proceed to dig further. An industrial robotics pioneer, Joseph Engelberger’s, remarks on the definition of a robot, making it clear that it can’t live through a single description. Their applications are far and wide, and using a single book definition to cater for all robots fails to comprehensively capture all the functional applicability of the joined robotics categories. The robotic constitution is therefore written differently by industrial or individual owners based on their environmental backgrounds and how well the robots adapted to a work environment of their choice.
Some popular robots that made it to the robotics hall of fame include:
- R2D2 and C-3PO: The Star Wars movies’ hosts this robot. It has multiple personalities, and it is intelligent enough to initiate a verbal conversation with humans.
- Sony’s AIBO: A robotic dog on a learning quest and thus mostly seeks human interaction.
- Honda’s ASIMO: The robot emulates a healthy person by walking on two legs.
- Industrial Robots: Automates and applies themselves to assembly lines.
- Data: It is a Star Trek’s most humane representation of a human android.
- BattleBots: They are Comedy Central’s remotely controlled fighters.
- Bomb-defusing robots.
- NASA’s Mars Rovers.
- HAL: A ship-based robot.
- Robomower: They are Friendly Robotics’ lawn-mowing robots.
- Lost in Space television series’ robot.
- MindStorms: Include the Popular robotics kit from LEGO.

Img source: flexcontact.com.br
A section, if not all of the human population, considers the list mentioned above as robots. On a broadened definition scale, if the larger population of humans think of it as a robot, then it is one. However, the use of a precise definition is the style of most robotic creators. They have specificity on the reprogrammable brain of a robot and how it can move a body.
The definition of robots distinct itself from automobiles and other movable machines due to their unique computer element. The onboard computers on many new cars only effectuate the functionality of minimal adjustments. The physical nature of robots distinguishes them from ordinary computers. Moreover, normal computers lack the dressing of a physical body which the robots fully embrace.
Robotic Basics
Several common qualities tie together a majority of robots. The first trait of all robots is a movable body. The body movements can be motorized by wheels, or be a compact segment applicable to a dozen robotic body parts. Metals or plastics make up such segments. The joining of the segments on the robotic body follows the same principle that applies to the human bones, that is, joints. They connect the individual segments.
An actuator enables the robots to spin the pivot jointed segments and wheels, if any. The actuators can be solenoids or electric motors for some robots or hydraulic systems for others. A pneumatic system that effectuates the use of compressed gas is also a preference for others. All these types of actuators are optionally applicable to a robot.

The actuators can only be active through the provision of a robotic power source. A direct plug to a power source or the use of batteries is the option of most robots. For hydraulic robots, the presence of a pump will be useful in pressurizing the hydraulic fluid. A pneumatic robot, on the other hand, will only seek the availability of compressed air tanks or air compressor.
An electric circuit completes the wiring of all the actuators. It is thus possible to directly power the solenoids and electrical motors through the Circuit. Hence the resulting manipulated electrical valves end up activating the hydraulic system. The pressurized fluids through the valves can navigate through the machine. To achieve the movement of a hydraulic leg as an example would require the opening of the valve by the robot’s controller. The valve would then make a connection between the fluid pump and a piston-cylinder that has direct contact with the target leg. Thus pressurizing the fluid would cause the piston to extend, and the leg would swivel forward. Making use of pistons that push both ways will enable the segments to move in two directions.
All the circuit components are under the control of the robot’s computer. Hence if the robots require motion, the computer will activate the needed valves and motors. The reprogrammable trait of most robots makes it easy to change their functional response or behavior through writing a new executable program and installing it on its computer.

Img source: rendia.com
Not all robots have the privilege of owning a sensory system. Thus only a select few can taste, smell, hear, or see. However, a common robotic sense is movement, making it a master of its motion. A robotic joint attached with slotted wheels defines its standard design. Moreover, a single side of the wheel has LED. A light sensor exists on an adjacent side of the wheel. The beam of light from the LED passes through the slots to the adjacent wheel side. Hence the robotic movement of a particular joint will trigger the slotted wheels to turn. The light beam breaks as a result of the slots through each wheel spin. The light sensor is thus able to interpret the flashing light pattern and relay the transmission of data to the robot’s computer. Computer Mice makes use of such a functional system.
These are the necessary steps that define how to nut and bolt a robot. The combination of such elements by the robot makers can lead to the creation of a robot with untouched potential and complexity.


